Witam,
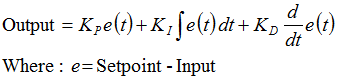
Chcę napisać algorytm do sterowania silnikami opartymi o człon PID aby wyeliminować kołysanie mojego quadcoptera. Nie jestem jeszcze na studiach więc nie miałem pochodnych i całek potrzebnych do członów D i I. Przeszukałem trochę sieć więc znalazłem taki kod:
I mam kilka pytań:
- Dla każdego silnika wyliczam tym algorytmem osobno, tak?
- Do całkowania potrzebuje zrobić tablicę dla każdego silnika, przechowywać w niej np. wartości z ostatnich 2 sekund?
- Czy do takiego równania mogę brać wartości ujemne (chodzi mi o I i D).
Prosiłbym o wskazówki, szczególnie do tych członów I i D. Osobiście trochę zapoznałem się całkami i pochodnymi, jednak bez praktycznych ćwiczeń nie wiem jak to rozgryźć.
Z góry dziękuje.