nie wiem co może być jeszcze istotne. Może po prostu wkleję cały kod.
Niestety taki mam do rozwiązania. Pogram już od jakiegoś czasu działa i poradziłem sobie bez większych trudności. Chcę go natomiast nieco rozbudować i tutaj pojawił się problem.
Mieszanie języków i owszem, bo więcej piszę w C ale na mikroprocesory więc ciężko mi się przerzucić.
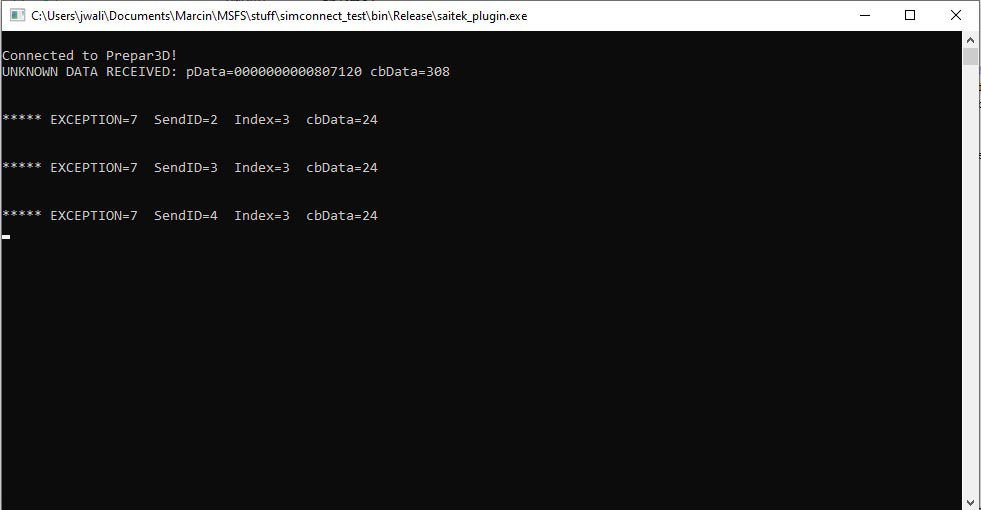
Jestem świadomy tego, że może się okazać, iż rozwiązanie z char jest poprawne, a to simconnect nie zrzuca poprawnie danych ale chciałem tutaj zapytać bardziej doświadczonych
Kopiuj
extern "C" {
#include "Include/DirectOutput.h"
#include "Include/SimConnect.h"
#include "Include/leds.h"
}
#include <vector>
#include <iostream>
#include <cwchar>
#include <stdio.h>
#include <windows.h>
#include <tchar.h>
#include <strsafe.h>
#include <map>
#include <thread>
#include <fstream>
#include <string>
#include "src/pugixml.hpp"
using namespace std;
//------zmienne--------------------------------------
HRESULT hr;
DWORD cbData = 0;
bool bRequestProcessed = false;
DWORD dwPage = 1;
bool blink;
SIMCONNECT_RECV* pData = NULL;
SIMCONNECT_RECV_SIMOBJECT_DATA* pObjData = NULL;
std::vector<void*> devices;
HANDLE hSimConnect = NULL;
//-----------------definicje---------------------------
enum DATA_DEFINE_ID
{
DEFINITION_ID_AP,
};
enum DATA_REQUEST_ID
{
REQUEST_AP_SETTINGS,
};
enum EVENT_ID
{
EVENT_SET_AP_ALTITUDE,
};
std::vector<std::string> mfdLine {"AP_CRS1", "AP_HDG", "AP_VS"};
std::vector<std::string> diody {"", "", "", "", "", "", "", "", "", "", "", "", "", "", "", "", "", "", ""};
std::map<std::string, int> dek {{"LED_FIRE", 0}, {"LED_FIRE_A", 1}, {"LED_FIRE_B", 3}, {"LED_FIRE_D", 5}, {"LED_FIRE_E", 7}, {"LED_TOGGLE_1_2", 9}, {"LED_TOGGLE_3_4", 11}, {"LED_TOGGLE_5_6", 13}, {"LED_POV_2", 15}, {"LED_CLUTCH", 17}, {"LED_THROTTLE", 19},};
struct DataRefs
{
double flaps;
double spoilers_pos;
double spoilers_armed;
double spd;
double gear;
double ap_master;
double ap_hdg_lock;
double ap_nav1_lock;
double ap_alt_lock;
double ap_app_lock;
double ap_nav_selected;
double ap_hdg;
double ap_alt;
double ap_vs;
double ap_spd;
double ap_crs1;
double ap_crs2;
double ap_crs3;
double autothrottle_lock;
double altitude;
double verticalspeed;
double hdg;
double rev;
double lightlanding;
double parkingbrake;
double enginerpm1;
double enginerpm2;
double batt_master;
double retr_gear;
double light_taxi;
double light_beacon;
double light_nav;
double light_strobe;
double light_panel;
double stall_wrn;
double overspeed_wrn;
double inner_marker;
double middle_marker;
double outer_marker;
[MarshalAs(UnmanagedType.ByValTStr, SizeConst = 32)]
string tailnumber;
};
//-----------FUNKCJE------------------------------
void __stdcall DirectOutput_Device_Callback(void* hDevice, bool bAdded, void* pvContext) {
if (bAdded) {
devices.push_back(hDevice);
}
else {
}
}
void __stdcall DirectOutput_Enumerate_Callback(void* hDevice, void* pvContext) {
devices.push_back(hDevice);
}
void XMLParsing(void){
using namespace pugi;
std::cout << "Loading settings:\n";
std::ifstream xml_file("settings.xml");
if(!xml_file){
std::cerr << "ERROR: opening XML file: " << std::endl;
}
xml_document doc;
xml_parse_result res = doc.load(xml_file);
if(!res){
std::cerr << "ERROR: " << res.description() << std::endl;
}
xml_object_range<xml_named_node_iterator> sources =
doc.child("root").children("leds");
xml_named_node_iterator s;
std::string jakiPzycisk, jakiStatus, jakaLinia;
for(s = sources.begin(); s != sources.end(); ++s)
{
xml_object_range<xml_named_node_iterator> btns =
s->children("btn");
//-----LEDS-------
xml_named_node_iterator v;
for(v = btns.begin(); v != btns.end(); ++v){
jakiPzycisk = v->attribute("name").as_string();
diody[dek[jakiPzycisk]] = v->attribute("function").as_string();
std::cout << "-> " << jakiPzycisk << " / " << v->attribute("function").as_string() << "\n";
}
//----MFD-----
xml_object_range<xml_named_node_iterator> mfdLines =
s->children("mfd");
for(v = mfdLines.begin(); v != mfdLines.end(); ++v){
jakaLinia = v->attribute("name").as_string();
mfdLine[std::stoi(jakaLinia)] = v->attribute("function").as_string();
std::cout << "-> MFD: " << jakaLinia << " / " << v->attribute("function").as_string() << "\n";
}
}
}
void mfd_Print(double spd, double vs, double alt){
wchar_t txt[14];
swprintf_s(txt, L"SPD: %.0f kts", spd);
int txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, 0, txtsize, txt);
swprintf_s(txt, L"V/S: %.0f f/m", vs);
txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, 1, txtsize, txt);
swprintf_s(txt, L"ALT: %.0f ft", alt);
txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, 2, txtsize, txt);
}
void mfdPrintLines(void){
wchar_t txt[14];
DataRefs* pDataRefs = NULL;
pObjData = (SIMCONNECT_RECV_SIMOBJECT_DATA*)pData;
pDataRefs = (DataRefs*)&pObjData->dwData;
for(uint8_t i;i<3;i++){
if(mfdLine[i] == "SPD"){
swprintf_s(txt, L"SPD: %.0f kts", pDataRefs->spd);
} else if(mfdLine[i] == "ALT"){
swprintf_s(txt, L"ALT: %.0f ft", pDataRefs->altitude);
} else if(mfdLine[i] == "V/S"){
swprintf_s(txt, L"V/S: %.0ff/m", pDataRefs->verticalspeed);
} else if(mfdLine[i] == "HDG"){
swprintf_s(txt, L"HDG: %.0f", pDataRefs->hdg);
} else if(mfdLine[i] == "AP_HDG"){
swprintf_s(txt, L"ApHDG: %.0f", pDataRefs->ap_hdg);
} else if(mfdLine[i] == "AP_ALT"){
swprintf_s(txt, L"ApALT: %.0fft", pDataRefs->ap_alt);
} else if(mfdLine[i] == "AP_V/S"){
swprintf_s(txt, L"ApV/S: %.0ff/m", pDataRefs->ap_vs);
} else if(mfdLine[i] == "AP_SPD"){
swprintf_s(txt, L"ApSPD: %.0f kts", pDataRefs->ap_spd);
} else if(mfdLine[i] == "AP_CRS1"){
swprintf_s(txt, L"ApCRS1: %.0f", pDataRefs->ap_crs1);
} else if(mfdLine[i] == "AP_CRS2"){
swprintf_s(txt, L"ApCRS2: %.0f", pDataRefs->ap_crs2);
} else {
swprintf_s(txt, L"");
}
int txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, i, txtsize, txt);
}
}
void mfdClearLines(void){
wchar_t txt[14];
for(uint8_t i;i<3;i++){
swprintf_s(txt, L"");
int txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, i, txtsize, txt);
}
}
void clear_led(void){
DirectOutput_SetLed(devices[0], dwPage, LED_TOGGLE_1_2_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_TOGGLE_1_2_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_TOGGLE_3_4_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_TOGGLE_3_4_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_TOGGLE_5_6_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_TOGGLE_5_6_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_CLUTCH_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_CLUTCH_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_A_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_A_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_B_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_B_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_D_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_D_RED, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_E_GREEN, 0);
DirectOutput_SetLed(devices[0], dwPage, LED_FIRE_E_RED, 0);
}
void color_led(uint8_t nr, int8_t param){
if(nr==LED_FIRE || nr==LED_THROTTLE){
if(param==0){ //wylaczony
DirectOutput_SetLed(devices[0], dwPage, nr, 0); //green
} else {
DirectOutput_SetLed(devices[0], dwPage, nr, 1); //green
}
} else {
if(param==0){ //wylaczony
DirectOutput_SetLed(devices[0], dwPage, nr, 1); //red
DirectOutput_SetLed(devices[0], dwPage, nr+1, 0); //green
} else if (param==1){ //wlaczony
DirectOutput_SetLed(devices[0], dwPage, nr, 0); //red
DirectOutput_SetLed(devices[0], dwPage, nr+1, 1); //green
} else if (param==-1){ //diody wylaczone
DirectOutput_SetLed(devices[0], dwPage, nr, 0); //red
DirectOutput_SetLed(devices[0], dwPage, nr+1, 0); //green
}else { //stan posredni
DirectOutput_SetLed(devices[0], dwPage, nr, 1); //red
DirectOutput_SetLed(devices[0], dwPage, nr+1, 1); //green
}
}
}
void flash(uint8_t ledNR){
for(uint8_t x;x<10;x++){
color_led(ledNR,0);
Sleep(80);
color_led(ledNR,-1);
Sleep(50);
}
}
void colorFlash(uint8_t ledNR, uint8_t color){
for(uint8_t x;x<10;x++){
color_led(ledNR,color);
Sleep(80);
color_led(ledNR,-1);
Sleep(50);
}
}
void set_led(void){
DataRefs* pDataRefs = NULL;
pObjData = (SIMCONNECT_RECV_SIMOBJECT_DATA*)pData;
pDataRefs = (DataRefs*)&pObjData->dwData;
if(pDataRefs->batt_master > 10){ //jesli bateria wlaczona
uint8_t i;
for(i=0;i<20;i++){
if (diody[i] == "RED"){
color_led(i,0);
} else if (diody[i] == "GREEN"){
color_led(i,1);
} else if (diody[i] == "ORANGE"){
color_led(i,2);
} else if(diody[i] == "GEAR"){
if(pDataRefs->gear >0 && pDataRefs->gear <= 99){ //GEAR
color_led(i,2);
} else if (pDataRefs->gear == 100){
color_led(i,1);
} else {
color_led(i,0);
}
} else if (diody[i] == "PARKING_BRAKE"){
color_led(i,pDataRefs->parkingbrake); //PARKING BRAKE
} else if (diody[i] == "RPM_ENGINE_1"){
if(pDataRefs->enginerpm1 >500){ //ENGINE 1 RPM
color_led(i,1);
} else {
color_led(i,0);
}
} else if (diody[i] == "RPM_ENGINE_2"){
if(pDataRefs->enginerpm2 >500){ //ENGINE 2 RPM
color_led(i,1);
} else {
color_led(i,0);
}
} else if (diody[i] == "FLAPS"){
if(pDataRefs->flaps >=10 && pDataRefs->flaps < 90){ //FLAPS
color_led(i,2);
} else if (pDataRefs->flaps >=90){
color_led(i,1);
} else {
color_led(i,0);
}
} else if (diody[i] == "LANDING_LIGHTS"){
color_led(i,pDataRefs->lightlanding);
} else if (diody[i] == "AP_MASTER"){
color_led(i,pDataRefs->ap_master);
} else if (diody[i] == "REV_THRUST"){
if(pDataRefs->rev < 0){ //REVERSE THRUST
color_led(i,0);
} else {
color_led(i,1);
}
} else if (diody[i] == "TAXI_LIGHTS"){
color_led(i,pDataRefs->light_taxi);
} else if (diody[i] == "NAV_LIGHTS"){
color_led(i,pDataRefs->light_nav);
} else if (diody[i] == "BEACON_LIGHTS"){
color_led(i,pDataRefs->light_beacon);
} else if (diody[i] == "STROBE_LIGHTS"){
color_led(i,pDataRefs->light_strobe);
} else if (diody[i] == "PANEL_LIGHTS"){
color_led(i,pDataRefs->light_panel);
} else if (diody[i] == "LIGHTS_COMBO"){
if(pDataRefs->light_taxi == 1 && pDataRefs->lightlanding == 1){
color_led(i,0);
} else if (pDataRefs->light_taxi == 1 && pDataRefs->lightlanding == 0){
color_led(i,2);
} else if (pDataRefs->light_taxi == 0 && pDataRefs->lightlanding == 1){
color_led(i,1);
} else {
color_led(i,-1);
}
} else if (diody[i] == "STALL_WARNING"){
if(pDataRefs->stall_wrn == 1){
thread f1(flash, i);
f1.join();
} else {
color_led(i,-1);
}
} else if (diody[i] == "OVERSPEED_WARNING"){
if(pDataRefs->overspeed_wrn == 1){
thread f2(flash, i);
f2.join();
} else {
color_led(i,-1);
}
} else if (diody[i] == "MARKERS"){
if(pDataRefs->inner_marker == 1){
colorFlash(i,0);
} else if(pDataRefs->middle_marker == 1){
colorFlash(i,2);
} else if(pDataRefs->outer_marker == 1){
colorFlash(i,1);
}
} else if (diody[i] == "INNER_MARKER"){
if(pDataRefs->inner_marker == 1){
thread f3(flash, i);
f3.join();
} else {
color_led(i,-1);
}
} else if (diody[i] == "MIDDLE_MARKER"){
if(pDataRefs->middle_marker == 1){
thread f4(flash, i);
f4.join();
} else {
color_led(i,-1);
}
} else if (diody[i] == "OUTER_MARKER"){
if(pDataRefs->outer_marker == 1){
thread f5(flash, i);
f5.join();
} else {
color_led(i,-1);
}
} else if (diody[i] == "SPOILERS_ARMED"){
color_led(i,pDataRefs->spoilers_armed);
} else if (diody[i] == "SPOILERS"){
if(pDataRefs->spoilers_pos < 5){
color_led(i,0);
} else if (pDataRefs->spoilers_pos > 95){
color_led(i,1);
} else {
color_led(i,2);
}
} else if (diody[i] == "AP_HDG_LOCK"){
color_led(i,pDataRefs->ap_hdg_lock);
} else if (diody[i] == "AP_NAV1_LOCK"){
color_led(i,pDataRefs->ap_nav1_lock);
} else if (diody[i] == "AP_ALT_LOCK"){
color_led(i,pDataRefs->ap_alt_lock);
} else if (diody[i] == "AP_APP_LOCK"){
color_led(i,pDataRefs->ap_app_lock);
} else if (diody[i] == "AUTOTHROTTLE_LOCK"){
color_led(i,pDataRefs->autothrottle_lock);
} else if (diody[i] == "AP_COURSE_COMBO"){
if(pDataRefs->ap_hdg_lock == 0 && pDataRefs->ap_nav1_lock == 0 && pDataRefs->ap_app_lock == 0){
color_led(i,-1);
} else if (pDataRefs->ap_app_lock == 1){
color_led(i,2); //orange
} else if (pDataRefs->ap_nav1_lock == 1){
color_led(i,1); //green
} else if (pDataRefs->ap_hdg_lock == 1){
color_led(i,0); //red
}
}
}
//mfd_Print(pDataRefs->spd, pDataRefs->verticalspeed, pDataRefs->altitude);
mfdPrintLines();
} else {
clear_led();
mfdClearLines();
}
}
void glowny(void){
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "FLAPS HANDLE PERCENT", "Percent");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "SPOILERS HANDLE POSITION", "Percent");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "SPOILERS ARMED", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AIRSPEED INDICATED", "Knots");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "GEAR POSITION", "Percent");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT MASTER", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT HEADING LOCK", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT NAV1 LOCK", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT ALTITUDE LOCK", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT APPROACH HOLD", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT NAV SELECTED", "Number");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT HEADING LOCK DIR", "Degree");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT ALTITUDE LOCK VAR", "Feet");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT VERTICAL HOLD VAR", "Feet/minute");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOPILOT AIRSPEED HOLD VAR", "Knots");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "NAV OBS:1", "Degrees");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "NAV OBS:2", "Degrees");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "NAV OBS:3", "Degrees");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "AUTOTHROTTLE ACTIVE", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "Indicated Altitude", "feet");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "VERTICAL SPEED", "feet per minute");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "HEADING INDICATOR", "degrees");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "GENERAL ENG THROTTLE LEVER POSITION:1", "Percent");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "LIGHT LANDING", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "BRAKE PARKING POSITION", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "GENERAL ENG RPM:1", "Rpm");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "GENERAL ENG RPM:2", "Rpm");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "ELECTRICAL MAIN BUS VOLTAGE", "Volts");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "IS GEAR RETRACTABLE", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "LIGHT TAXI", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "LIGHT BEACON", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "LIGHT NAV", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "LIGHT STROBE", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "LIGHT PANEL", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "STALL WARNING", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "OVERSPEED WARNING", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "INNER MARKER", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "MIDDLE MARKER", "Bool");
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "OUTER MARKER", "Bool");
//
hr = SimConnect_AddToDataDefinition(hSimConnect, DEFINITION_ID_AP, "ATC FLIGHT NUMBER", "String");
hr = SimConnect_RequestDataOnSimObject(hSimConnect, REQUEST_AP_SETTINGS, DEFINITION_ID_AP, SIMCONNECT_OBJECT_ID_USER, SIMCONNECT_PERIOD_SECOND);
if (FAILED(hr)){
printf("RequestDataOnSimObject for AutopilotData structure - error\n");
}
bRequestProcessed = false;
while (!bRequestProcessed){
hr = SimConnect_GetNextDispatch(hSimConnect, &pData, &cbData);
if (SUCCEEDED(hr)){
set_led();
}
Sleep(100);
}
}
//++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
int main() {
printf("X52 Dynamic LED ver 2.2\n Saitek X52 PRO plugin for Microsoft Flight Simulator\n");
printf("Created by KoSik -> kosik84@gmail.com\n\n\n");
XMLParsing();
printf("Settings loaded!\n\n");
int q=0;
printf("Connecting with MSFS...");
while(1){
hr = SimConnect_Open(&hSimConnect, "Client Event", NULL, NULL, NULL, NULL);
if (SUCCEEDED(hr)) {
const wchar_t * name = L"X52_plugin";
DirectOutput_Initialize(name);
DirectOutput_RegisterDeviceCallback(*DirectOutput_Device_Callback, nullptr);
DirectOutput_Enumerate(*DirectOutput_Enumerate_Callback, nullptr);
const wchar_t * pageDebugName = L"X52_page";
DirectOutput_AddPage(devices[0], dwPage, pageDebugName, FLAG_SET_AS_ACTIVE);
const wchar_t * txt = L"Saitek X52 plugin";
int txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, 0, txtsize, txt);
txt = L" created by";
txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, 1, txtsize, txt);
txt = L" KoSik";
txtsize = std::wcslen (txt);
DirectOutput_SetString(devices[0], dwPage, 2, txtsize, txt);
printf("\nConnected to SimConnect!\n");
glowny();
break;
} else {
hr = SimConnect_Close(hSimConnect);
Sleep(5000);
q++;
printf(".");
}
if(q>60){
printf("\nFailed to Connect with SimConnect\n");
break;
}
}
// Close
hr = SimConnect_Close(hSimConnect);
return 0;
}